利用MAD工具实现多核启动
先总体地说一下MAD工具的作用:对于多个DSP核心,可能我们有对应的多个project,生成了多个.out文件,我们想把不同的projecct放在不同的core上运行。调试的时候我们可以通过仿真器手动把代码文件load到对应core上让它运行,但是怎么让板子在启动的时候自动加载代码到各个core上,这就是MAD工具解决的问题。除此之外,这个工具还能通过共享一部分代码文件达到节约内存的目的。
MAD(Multicore Application Deployment) 工具
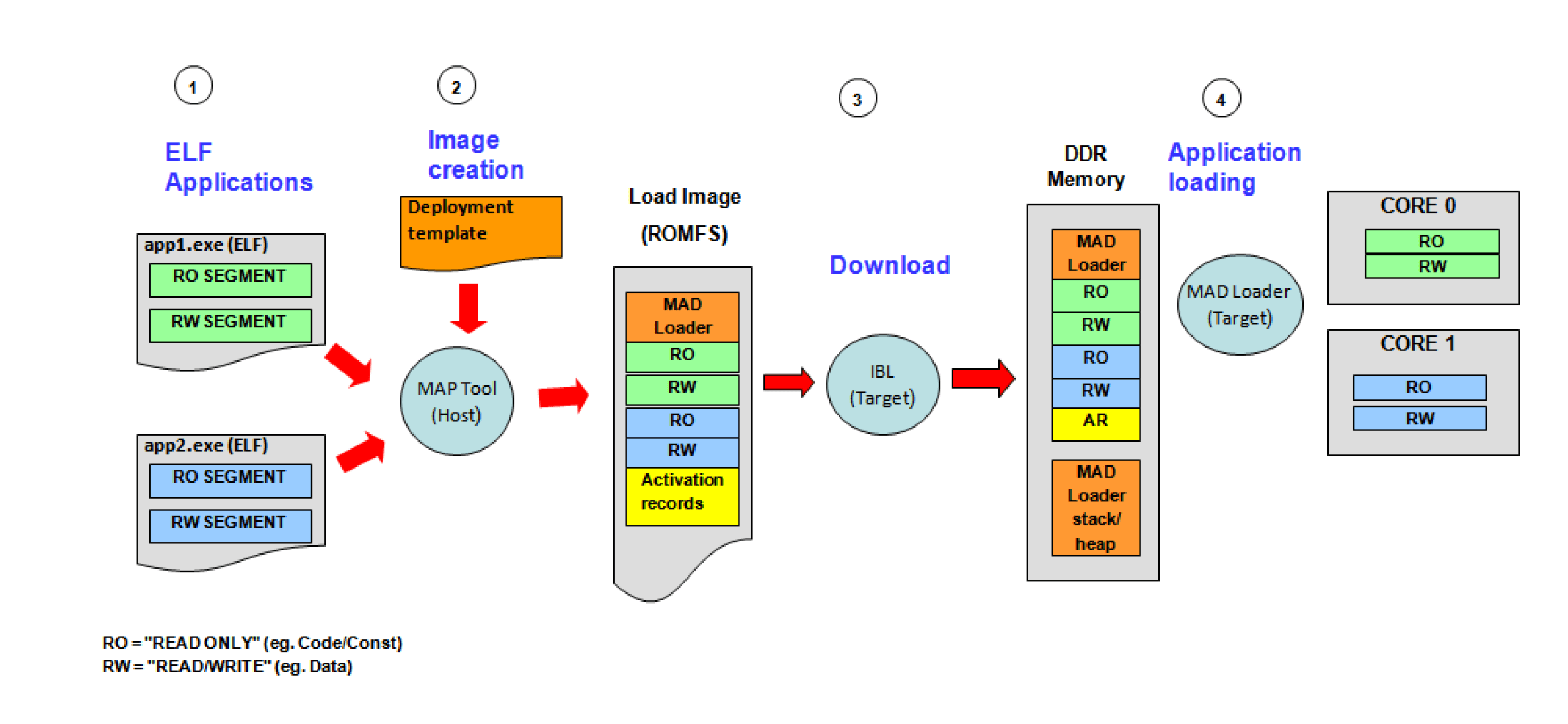
MAD工具主要包括两个部分:MAP Tools,MAD Loader。其中MAP Tools主要是在构建镜像文件时使用(.bin,Build Time Utility),MAD Loader主要是在板子上电启动之后,负责将镜像文件搬到各个core的内存上,并让各个core从起始代码段开始执行。
同时,MAD工具还有两种使用模式:Prelinker-bypass, Prelinker。Prelinker-bypass模式下,MAP Tools不会为应用程序的各个段分配内存,也不会进行地址绑定(调用prelinker),这同时也就要求我们已经提前将这些工作做好了。Prelinker模式下,则相反,会通过deploy.json配置文件进行相关的配置。
具体介绍。
image_processing 例程
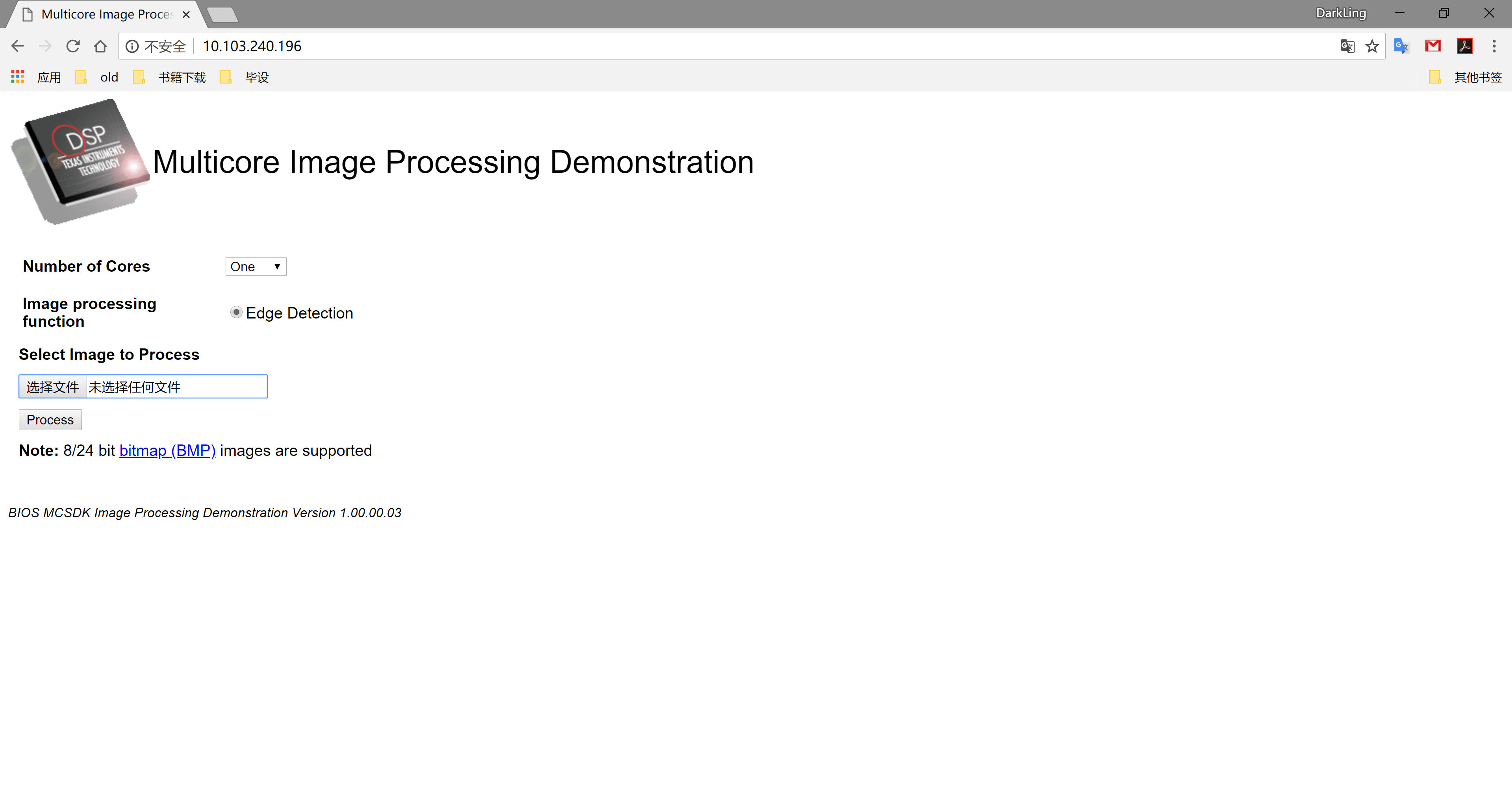
该例程位于mcsdk >demos >image_processing >utils >mad >evmc6678l下。默认在images目录下,已经有生成好的mcip-plbp-c6678-le.bin文件了,可以直接使用该文件,将其烧写到nor flash上,并进行一定的配置(后述),便可以在板子上跑起来该多核例程。效果如下:
由于该例程使用网线完成图片的传输,因而需要像之前的HUA例程一样进行配置,之前我使用的是静态IP方式,这次使用DHCP方式,该方式需要将板子的网线接到路由器,由路由器的DHCP server来给板子分配IP,板子启动时com4的界面如下:
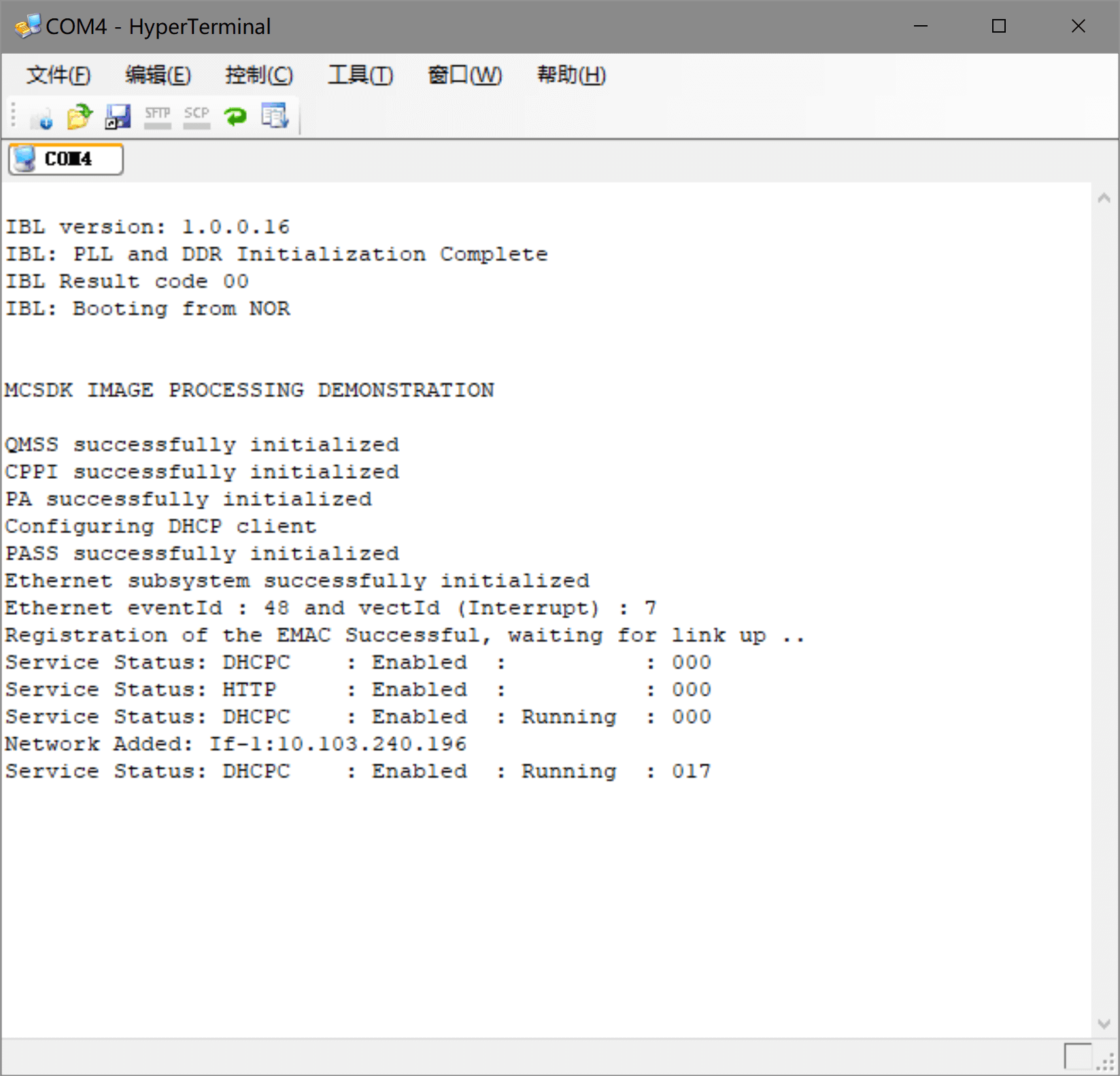
上图中的IP地址即为板子的IP,可以在浏览器中通过该IP访问到第一个图的网页。
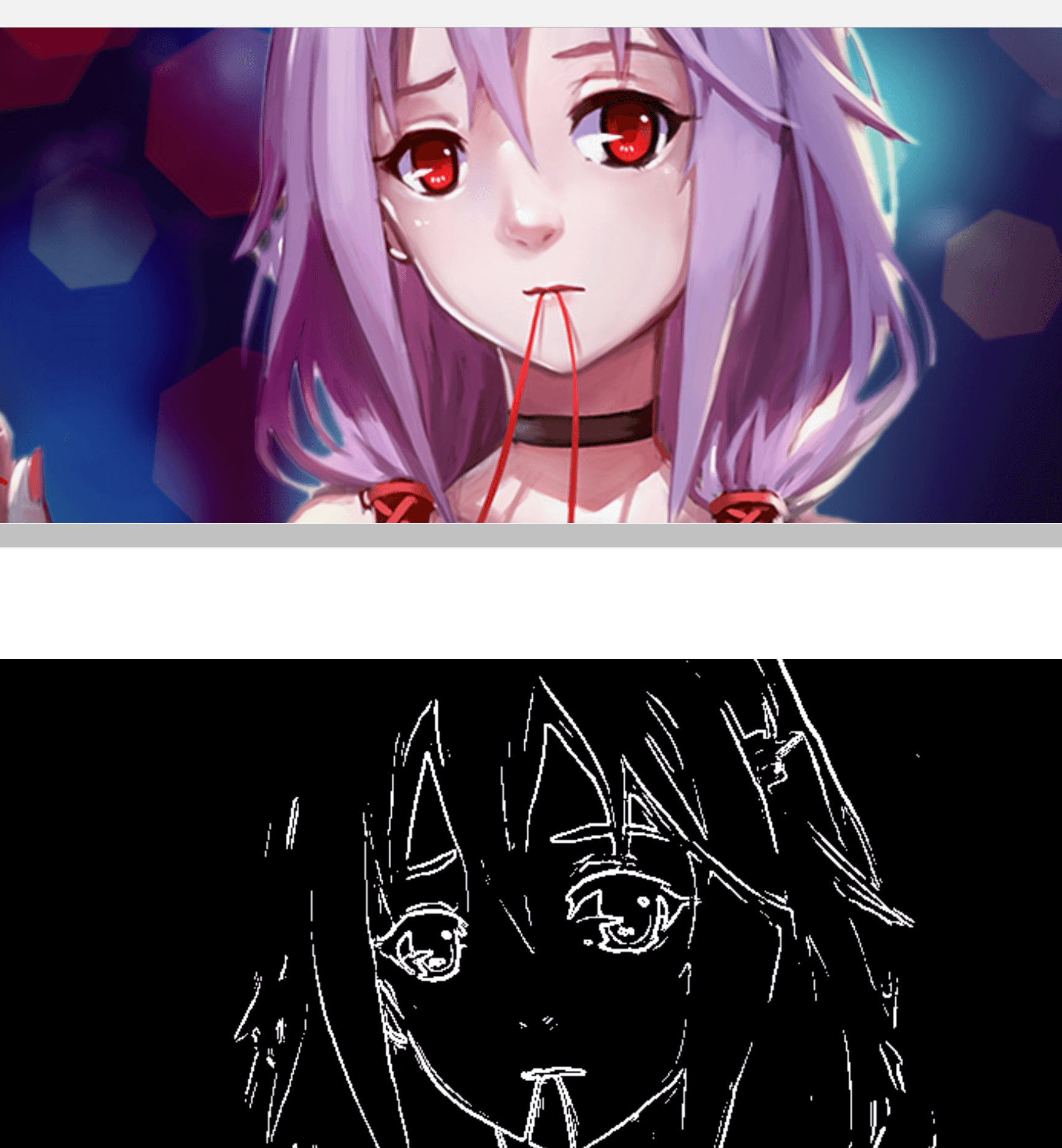
这个例程的功能就是,对图片(只支持bmp图片,可以将图片在画图中打开,另存为bmp图片)进行边缘检测处理,可以选择使用几个dsp核心对图片进行处理,可以看到使用的core越多,速度越快,处理结果(效果似乎一般)及对比如下:
下面说一下利用该目录下,config-files目录下的配置文件,使用MAP Tools工具重新生成mcip-plbp-c6678-le.bin的流程.
windows环境中需要安装mingw、python和Msys(模拟GNU环境)这个步骤另开blog记录吧。
修改build_mad_image.bat自动生成脚本,如下根据自己的编译器地址修改目录
1 | @set PATH="C:\ti\ccsv8\tools\compiler\c6000_7.4.23\bin";%PATH% |
修改maptoolCfg_evmc6678l.json配置文件
1 | { |
修改deployment_template_evmc6678l.json文件,注意原文件中,L2SRAM段中的secnamepat中缺少了”nimu_eth_ll2”,不加上会报错。
1 | { |
修改好后,再msys中输入:
cd /c/ti/mcsdk_2_01_02_06/demos/image_processing/utils/mad/evmc6678l/
./build_mad_image.bat
可以看到再images目录下生产了.bin文件。接下来需要将.bin文件烧写到nor flash中,由于我使用的是IBL NOR Flash启动方式,还需要对IBL进行一定的配置:
startAddress = 0x9e000000
branchAddress = 0x9e001040
按照之前配置IBL的方法将norflash中的上述部分修改成上面的地址。然后利用nor writer将.bin文件烧入nor flash。将网线连接到路由器,启动板子,可以看到上面的效果。
Led_play 例程
除了上面的例程外,我还从网上下载了Led灯闪烁例程,并且自己修改成两个核上运行程序,但是由于例程中的一些问题,使得程序一直无法正常运行,后来查找到问题,修改后正常工作。
首先是将Led_play例程改成循环点亮改成单灯闪烁。
for (i = 0; i < length; i++) {
if (platform_uart_write(message[i]) != Platform_EOK) {
return;
}
}
for (i=0;i<p_info.led[PLATFORM_USER_LED_CLASS].count;i++)
{
platform_led(i, PLATFORM_LED_OFF, PLATFORM_USER_LED_CLASS);
}
while(1) {
platform_led(led_no, PLATFORM_LED_ON, PLATFORM_USER_LED_CLASS);
platform_delay(150000);
platform_led(led_no, PLATFORM_LED_OFF, PLATFORM_USER_LED_CLASS);
platform_delay(150000);
//led_no = (led_no) % p_info.led[PLATFORM_USER_LED_CLASS].count;
}
接着,修改例程中导致程序无法在core0以外运行的错误:
//memset(&init_flags, 0x01, sizeof(platform_init_flags)); 错误
memset(&init_flags, 0x00, sizeof(platform_init_flags));
memset(&init_config, 0, sizeof(platform_init_config));
原来的初始化代码会导致将程序在load到core0以外的core时,会abort,无法运行。(因此我利用MAP生成的.bin一直无法正常工作,我还以为时MAP工具配置的问题,查找了很久,最后才发现~……~,一开始在core0正常运行了,就想当然地认为能正常在其它core上跑,事实证明不能想当然~_~)。
补充
预览生成的.bin文件执行效果
生成的.bin文件可以在CSS中先测试是否能够正常使用。步骤如下:
- 连接core0,执行C6678L.gel初始化脚本。
- 在memory browser中输入0x9E000000,Load memory,将.bin文件烧写进去。
- 点击core0,在Register窗口中找到PC寄存器,将其值改为0x9E001040。
- run >resume
这样可以看到多核程序正常跑起来。
单镜像
MAD方式可以将多个镜像连接成一个,并自动将数据加载到各个core指定的内存上,除了这个方法外,还可以将同一份代码同时加载到多个core的内存中,并通过代码判断当前的核心,从而执行不同的程序。但是具体还没实践过,留待实验。
MAD启动流程
参考一
参考二
Rom bootloader会在所有的core上运行,但是执行不同的功能。在core0,会执行真正的boot loader;在core1,会执行一条idle指令,等待core0将其唤醒。
IBL存储在EEPROM上,有RBL启动执行,但是IBL只在core0上执行。
启动时RBL启动IBL并执行,IBL将NOR FLASH上的MAD image下载到DDR上,同时由上面配置IBL的步骤可以知道,接下来IBL会跳转到一个执行程序入口地址,在该配置下,就是MAD Loader。
MAD Loader的责任就是解析ROMFS image,将各个数据段加载到它们的执行地址,并在各个指定的core上启动程序的执行。(MAD Loader帮我们完成了唤醒其它core执行的任务)